生理学実験技術データベース
Experimental Techniques for Physiological Sciences
G4-3
Last update: 2010-10-22
マッスルセンサーのデモンストレーション用ロボットハンド Ver.1
Robot hand for the demonstration of the muscle sensor Ver.1
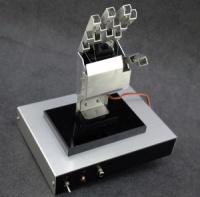
| Summary | Robot hand that operates with muscle sensor for teaching material by which we are doing development and sales. The finger is opened and shut by the ON/OFF signal of 3V. CPU is not used to control, and it does with the oscillation circuit and the monostable multivibrator. The servo motor for a cheap model robot is used. |
|---|---|
| 用途 | 生理研が開発し販売している、中高校生教材用のマッスルセンサー(http://www.nips.ac.jp/nipsquare/academy/musclesensor/)に接続して動作させるロボットハンド |
| 特徴 |
直流3VのON/OFF信号で、指の開閉を行う。 制御にはCPUを使用せず、発振回路と単安定マルチバイブレータで行うため、安価である。 安価な模型ロボット用サーボモーター(JR PROPO製 DSR581)を使用。 |
| 使用の制限 | なし |
| 使用方法 |
このロボットハンドは、マッスルセンサーの出力端子に接続すると筋電位の変化で手のひらが閉じる。マッスルセンサーの出力信号は、直流3Vの1bitの信号であるために、手のひらの開閉しか行えないが、自分の筋肉の動きでロボットハンドが動く姿を見ることができる。
制御回路構成 74HC14で、約20msの発振回路を構成し、パルスの立ち上がりを用い74HC123でパルス幅を1~2ms 周期20msのPWM信号とする。PWM信号のパルス幅は、手を開いたときと閉じた時の2種類が必要であり、74HC123のパルス幅決定に使用される抵抗とコンデンサのうち、抵抗をリレーで切り替えて生成している。この抵抗は、半固定抵抗を用い、サーボモーターの回転角度が調整できる。マッスルセンサーの出力は、安定したパルスではなく、スイッチのチャタリングに似た短いパルス的な信号として与えられる。このため、74HC123のもう一つのマルチバイブレータ回路を使用し、信号が入力されたら、その立ち上がりから1秒間程度のパルスを作製し、保持回路としリレーの駆動を行う。 ロボットハンド部 指の背側に板バネを設置し、腹側に牽引ワイヤーを通す。ワイヤーを引かない状態では、板バネにより指は伸びた状態を保持する。サーボモータによりワイヤーを牽引すると、指の内側が引っ張られるため、指が屈曲する。 |
| 部品一覧 |
指パーツ、手の甲、手のひら&サーボ部、固定台、組み付け図、回路図 部品一覧
|
| 参考資料 | 制御回路、指部拡大、手の甲、指を伸ばした状態、指を曲げた状態 |